Mehitamata õhusõiduki süsteem ja selle tehnilised omadused
Mehitamata õhusõiduki last ja komponendid
Tasakaal
Õhusõidukil nagu igal kehal on kolm pöörlemistelge, mis on omavahel risti ja läbivad raskuskeset (Joonis 6)
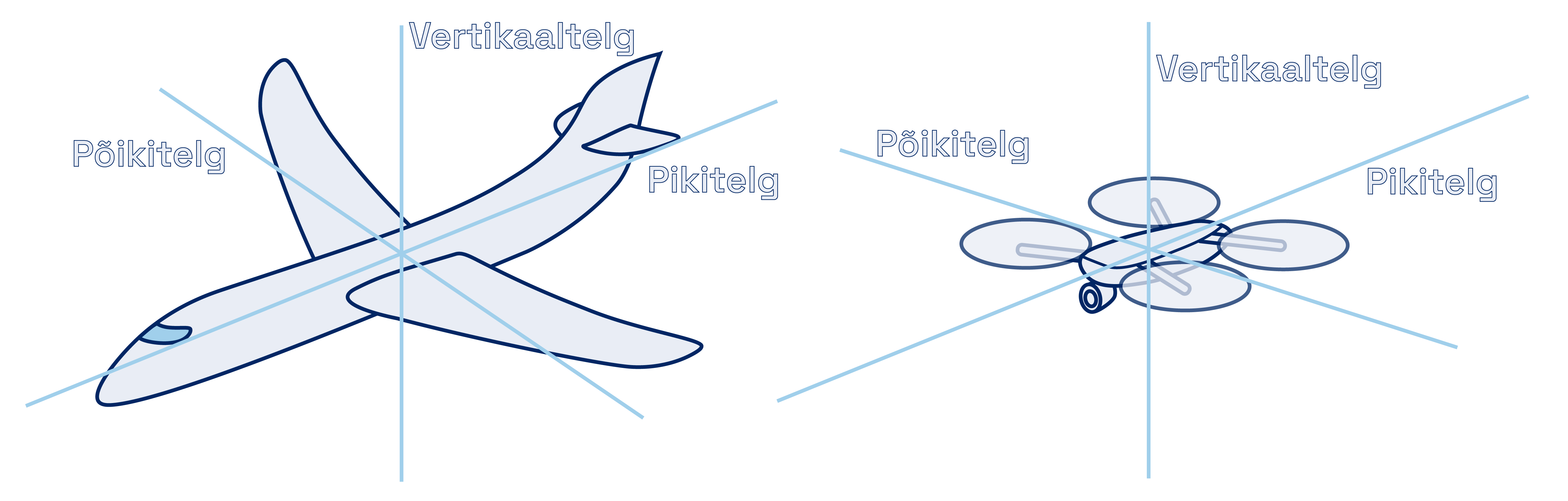
Joonis 6. Õhusõiduki teljed.
Õhusõiduk võib pöörelda ümber kõigi kolme telje. Tasakaaluks mingi telje suhtes nimetame olukorda, kus õhusõiduk ümber selle telje ei pöörle (st. on tasakaalus). Täielik tasakaal realiseerub olukorras, kus õhusõiduk ei pöörle ümber ühegi telje. On arusaadav, et taoline olukord on nõutav õhusõiduki satabiilsete lennurežiimide korral nagu horisontaallend, ripplend, kõrguse võtmine, laskumine.
Püsivus
Tasakaalu võib olla mitut liiki. Kui süsteem tasakaalust välja viia ja seejärel süsteem omab tendentsi esialgne tasakaaluasend taastada, siis selle kohta öeldakse, et tegemist on püsiva tasakaaluga. Õhusõidukid püütakse konstrueerida nii, et nad oleksid püsivad kõigi kolme telje suhtes. See tähendab, et kui mingi väline mõju rikub tasakaalu mingi telje suhtes, siis õhusõiduk omab tendentsi see tasakaal taastada ilma juhtimiseta (st. ilma piloodi või autopiloodi vahelesegamiseta).
Juhitavus
Juhitavuseks nimetatakse õhusõiduki võimet vastavalt piloodi või autopiloodi tegevusele muuta õhusõiduki nurka ümber ühe, teise või kolmanda telje. On arusaadav, et juhitavus ja püsivus on teatud mõttes vastandlikud omadused. Suur püsivus raskendab juhtimist, sest õhusõiduk püüab endist tasakaaluolekut taastada. See tähendab, et ei ole võimalik saavutada ühtaegu väga head püsivust ja väga head juhitavust. Iga õhusõiduki jaoks püütakse vastavalt õhusõiduki eesmärgile leida optimaalne püsivuse ja juhitavuse vahekord.
Lennuki tüüpi õhusõidukitel on püsivuse ja juhitavuse küsimus küllaltki edukalt lahendatud. Lahendatud on suures lennunduses see küsimus ka helikopterite jaoks. Mehitamata õhusõidukite puhul kohtame pöördtiivalise tüübina aga põhiliselt multirootor tüüpi õhusõidukeid, mille rootoritel puuduvad labade seadenurga automaadid, mis on olemas suurtel helikopteritel. Sellel põhjusel on multirootori tüüpi õhusõidukid üldjuhul ebapüsivad vähemalt kahe telje suhtes. Seetõttu pole ükski multirootori tüüpi õhusõiduk võimeline lendama ilma autopiloodi pideva sekkumiseta. Seega on multirootorite puhul realiseeritud olukord, kus püsivuse puudumine on kompenseeritud ülikiire ja täpse juhtimisega. Siit ka üldisem järeldus – püsivuse puudumist on alati võimalik kompenseerida vastava kiiruse ja täpsusega juhtimisega. Seda juhtimist teostab muidugi autopiloot, sest sedavõrd kiire ja täpne juhtimine käib üle inimvõimete piiri.
Sellegipoolest on õhusõiduki raskuskeskme asukoht väga oluline õhusõiduki edukaks tegevuseks lennul. Põhimõtteliselt on raskuskeskme asukoha piirid tarvis paika panna kõigi kolme telje suhtes, et oleks tagatud õhusõidukile vajalik tasakaal, püsivus ja juhitavus. Ka raskuskeskme asukoha piirid paneb antud õhusõiduki jaoks paika üldjuhul selle tootja. Õhusõiduki lastimisel on aga lisaks lasti kaalule ja raskuskeskme asukohale vahel tarvis arvestada ka lasti gabariitidega. Tõepoolest, last võib kaalu poolest ja ka raskuskeskme asukoha poolest olla antud õhusõidukile sobiv, kuid lasti gabariidid ja kuju võivad oluliselt mõjutada õhusõiduki aerodünaamilisi omadusi. On selge, et rikutud aerodünaamilise kujuga õhusõiduk kaotab oma sooritusvõimes, äärmistel juhtudel kaotab aga lennuvõime üldse. Äärmiselt oluline ka lasti korrektne kinnitamine õhusõidukil, sest ebakindla kinnituse tõttu võib last õhusõidukilt kas eralduda või muuta oma asukohta ja seetõttu rikkuda õhusõiduki tasakaalu, püsivust või juhitavust. Kokkuvõtvalt: Õhusõiduki lastimisel on vaja jälgida:
Lasti kaalu
Lasti kaalu jaotust õhusõidukil
Lasti gabariite
Lasti nõuetekohast kinnitust
Pardaseadmed
Autopiloot
Mehitamata õhusõidukite autopiloot, mis juhib kogu süsteemi toimimist ja käitub nagu õhusõiduki „aju“, vajab arvutuste tegemiseks ning drooni stabiliseerimiseks sisendit erinevatelt sensoritelt. Sensorid annavad autopiloodile infot drooni asukoha, asendi, kiiruste, kiirenduste ja ümbritseva suhtes. Nagu eelnevalt mainitud, on mitme rootoriga õhusõiduki puhul autopiloot asendamatu, kuna süsteem ise on aerodünaamiliselt ebastabiilne ja ilma pideva autopiloodi sekkumiseta ei oleks lend võimalik.
Inertsiaalandur - IMU
Esimeseks ja kõige olulisemaks sensoriks on inertsiaalandur (IMU – Inertial Measurement Unit). IMU koosneb güroskoopidest ja kiirendusanduritest. Güroskoobid annavad autopiloodile infot drooni nurkkiiruste kohta kolme telje suhtes. Seega güroskoopide abil on võimalik autopiloodil oma asendit hoida iseenda suhtes. Selline stabiliseerimine toimub näiteks racer droonide ACRO lennureziimis, kus droon ei hoia ennast maapinnaga paralleelselt vaid kontrollsisendite puudumisel püüabki hoida oma asendit iseenda suhtes. Ainult güroskoopide abil lendamine on aga keeruline ning kaugpiloot peab ise pidevalt korrigeerima, et droon üldse õhus püsiks.
Kiirendusandurid mõõdavad drooni kiirendust kolme telje suhtes. Kiirenduse mõõtmine on oluline maakera gravitatsiooni tajumiseks. Selle abil saab autopiloot drooni hoida maaga paralleelselt ning seeläbi tajuda oma asendit lisaks ka maapinna suhtes. Kiirendusandurite abil piirab droon kaldenurga maapinna suhtes turvalisele tasemele.
Kompass
Kompass on samuti oluline seade, selle kaudu saab autopiloot informatsiooni oma suuna kohta maakera suhtes. Kompassiga mõõdetakse maa magnetvälja ning selle abil saab autopiloot kindlaks teha drooni kursi.
Baromeeter
Kõrguse mõõtmiseks on droonidele paigutatud baromeeter, mis mõõdab õhurõhku. Kuna õhurõhk väheneb kõrguse kasvades, on võimalik õhurõhu abil hinnata drooni kõrgust. Rõhu järgi kõrguse hindamine aga ei toimi kuigi hästi siseruumides ning ka välitingimustes ei ole väga täpne, kuid on siiski
Satelliitnavigatsioon - GNSS
Seni oleme kirjeldanud erinevaid seadmeid, mis on vajalikud drooni stabiliseerimiseks. Absoluutse geograafilise positsiooni leidmiseks on lisaks veel kasutusel satelliitnavigatsioon (GNSS – global navigation satellite system), laiemalt levinud nimetusega GPS (global positioning system). Satelliitnavigatsiooni abil on võimalik positsioneerida õhusõiduk paarimeetrise täpsusega. Koostöös teiste anduritega suudab autopiloot hoida õhusõidukit paigal (multirootori puhul) ning lisab mitmeid funktsioone, nagu näiteks automaatne kodupunkti naasmine ja maandumine, etteplaneeritud marsruuti mööda lendamine, tuulistes tingimustes drooni asendi säilitamine jpm.
Satelliitnavigatsiooni edukaks kasutamiseks peab olema droonil hea ja takistamatu vaateväli otse üles, kuna just ülal asetsevatelt satelliitidelt saab ta positsioneerimiseks vajaliku info. See tähendab, et siseruumides ning näiteks sügavates orgudes või tiheda metsa all võib satelliidilt tulnud signaal olla liiga nõrk, et saavutada piisav täpsus. Selle tõttu on ka GNSSi antenn mehitamata õhusõidukitel paigutatud alati korpuse ülemisse osasse, et drooni enda tõttu tekitatud häireid vähendada.
Takistuste vältimine
Lisaks eelnimetatud anduritele võib leida moodsamate droonide pealt veel seadmeid, mis aitavad veelgi enam tagada turvalist lendu. Näiteks kasutatakse kauguse mõõtmiseks infrapuna või ultraheli andureid. Enamasti paiknevad need drooni all ning neid kasutatakse maandumise ja õhkutõusu ajal täpsema kõrgusinfo saamiseks. Takistuste vältimiseks kasutatakse stereokaameraid, mille abil suudab drooni autopiloot tajuda drooni ümbritsevaid füüsilisi takistusi ning vältida nendega kokku põrkamist.

Joonis 7. Droon, mis kasutab takistuste tuvastamiseks stereokaameraid.
Sensoorikast kokkuvõtteks:
- IMU – inertsiaalandur, mis omakorda koosneb
- Güroskoop – mõõdab nurkkiirusi kolme telje suhtes
- Kiirendusandur – mõõdab kiirendust kolme telje suhtes
- Kompass – mõõdab maakera magnetvälja suunda
- Baromeeter – mõõdab kõrgust õhurõhu kaudu
- GNSS (GPS) – leiab asukoha satelliitide kaudu
- Infrapuna või ultraheli andur – mõõdab kaugust maapinnast või takistustest
- Stereokaamera – tuvastab takistusi ning aitab vältida kokkupõrkeid
Drooni jõuallikad
Lisaks paljudele sensoritele on droonidel ka mootorid, ilma milleta oleks lend võimatu. Mootoreid on vaja, et liigutada propellereid või rootoreid, mis seeläbi tekitavad aerodünaamilise jõu. Tänapäevaste mehitamata õhusõidukite mootorid on enamasti harjadeta elektrimootorid (BLDC – Brushless Direct Current motor). Sellistel mootoritel on väga hea töökindlus, kuna liikuvaid osi on vähe ning hõõrdetakistus on väga väike (võrreldes harjadega elektrimootoriga). Harjadeta mootorite puhul on tarvis aga elektroonilist kiirusregulaatorit (ESC – electronic speed controller), mis juhib ja kontrollib mootori pöörlemiskiirust.
Suuremate mehitamata õhusõidukite puhul võidakse kasutada ka sisepõlemismootorit. Vedelkütusega töötava mootori eeliseks on kasutatava kütuse suur energiatihedus. Seetõttu saavad võrreldava suurusega sisepõlemismootoriga õhusõidukid elektriajamiga droonidest kauem lennata.
Kaamera stabiliseerimine - gimbal
Kuna õhusõiduk muudab lennates pidevalt oma asendit, tuleb arusaadava kaamerapildi saavutamiseks kasutada stablilisaatorit ehk gimbali. Gimbal koosneb väikestest mootoritest ja konstruktsioonist, mis lubavad liigutada kaamerat erinevate telgede suhtes.

Joonis 8. Kolmeteljeline kaamera gimbal
Kolmeteljeline gimbal suudab hoida kaamera paigal kõige kolme telje suhtes, st et ei ole vahet mis suunas droon liigub, kaamerapilt püsib stabiilsena. Kaheteljeline gimbal enamasti kompenseerib liikumisi nii piki- kui põikitelje suhtes, kuid vertikaaltelg on paigal. Vertikaalteljes stabliliseerimise puudumine tähendab seda, et kui droon pöörab oma nina vasakult-paremale, ei ole pilt kuigi stabiilne. Üheteljeline gimbal suudab stabiliseerida kaamerapilti vaid ühes suunas, näiteks pikitelje suhtes. See tähendab, et kaamerapilt on stabiliseeritud drooni vasakule ja paremale kallutamise suhtes.