Mehitamata õhusõiduki süsteem ja selle tehnilised omadused
| Õpikeskkond: | ELA Moodle |
| Kursus: | A2-alamkategooria kaugpiloodi teoreetiline koolitus |
| Raamat: | Mehitamata õhusõiduki süsteem ja selle tehnilised omadused |
| Printija: | Guest user |
| Kuupäev: | teisipäev, 21. juuli 2026, 23.54 PM |
Mehitamata õhusõiduki lennukarakteristika
Aerodünaamilised jõud
Iga õhusõiduk vajab raskusjõu kompenseerimiseks mingit teist jõudu. Õhust kergemate õhusõidukite puhul on selleks atmosfääri üleslükkejõud, õhust raskemate õhusõidukite puhul tuleb selleks aga kasutada kas aerodünaamilisi jõudusid või/ja õhusõiduki jõuallikaid. Vaatleme lähemalt aerodünaamiliste jõudude olemust.
Igale õhus liikuvale kehale mõjub liikumise tagajärjel aerodünaamiline kogujõud, mis üldjuhul ei ole samasihiline keha liikumise suunaga õhus. Selle jõu suurus ja suund sõltuvad keha kujust ja asendist õhuvoolu suhtes, samuti ka kiirusest. Kokkuleppeliselt jagatakse see aerodünaamiline kogujõud kaheks komponendiks – tõstejõuks ja takistusjõuks, kusjuures koordinaadistiku määrab õhuvoolu suund enne kehaga kohtumist (Joonis 1)
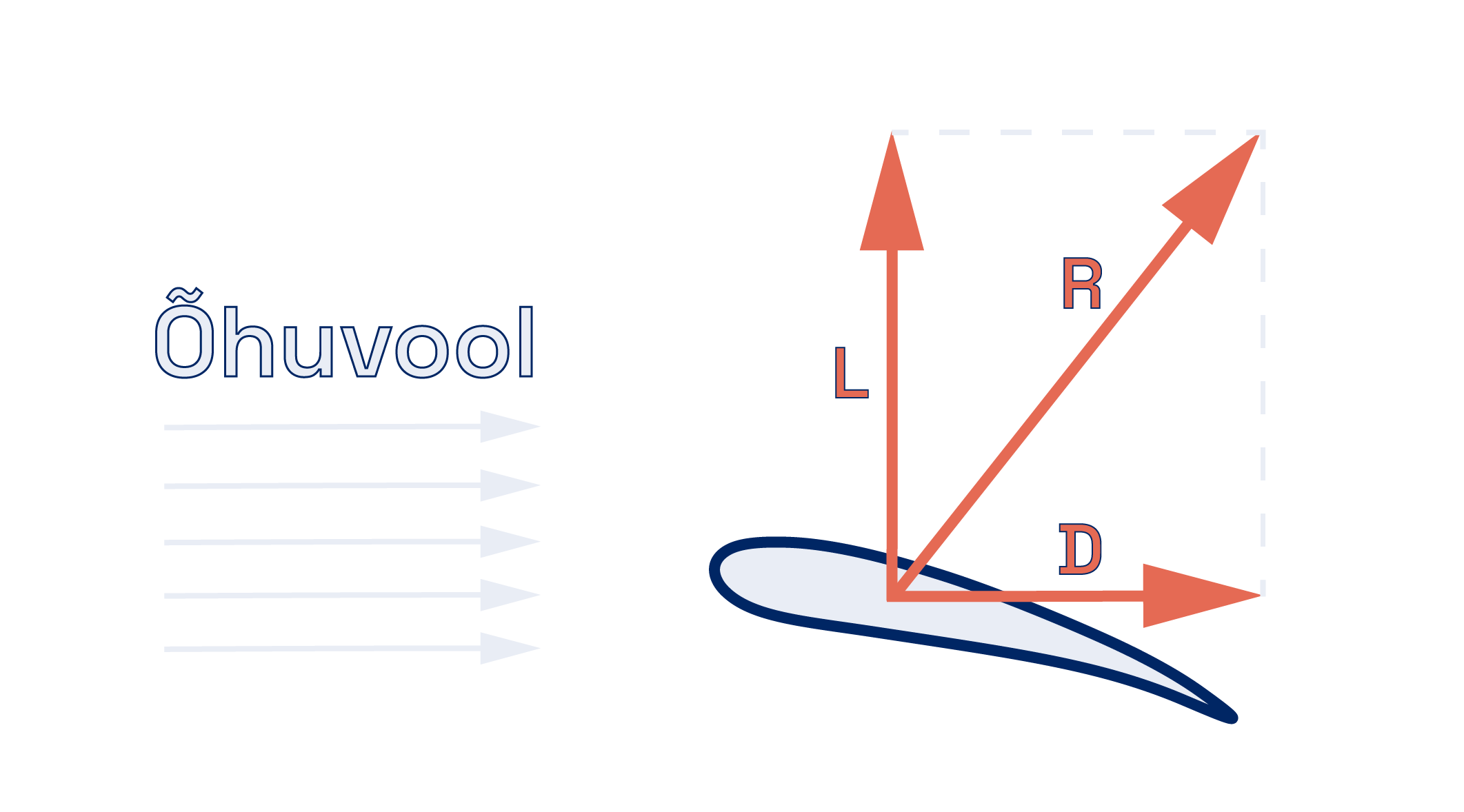
Joonis 1. Kehale mõjuv aerodünaamiline kogujõud R ja selle komponendid- tõstejõud L ja takistusjõud D.
Aerodünaamiline kogujõud, seega siis ka tõste- ja takistusjõud saavad tekkida vaid siis, kui keha õhus liigub. Tõstejõud on aerodünaamilise kogujõu komponent, mis mõjub õhuvooluga risti ja takistusjõud on komponent, mis mõjub liikumisele vastassuunas. Olgu kohe öeldud, et vaatamata oma nimetusele ei tõsta tõstejõud kunagi mitte midagi, st. ei saa näiteks suurendada õhusõiduki kõrgust. See on nii tänu asjaolule, et tõstejõud defineeritakse alati risti õhuvooluga (keha liikumisega) olevana ja ükski jõud ei saa teha tööd risti keha liikumisega. Küll aga saab tõstejõudu kasutada nii raskusjõu kompenseerimiseks kui ka kesktõmbekiirenduse andmiseks (nt. tsentrifugaaljõu kompenseerimiseks õhusõiduki manöövritel).
Õhusõiduki kõrguse suurendamine on võimalik vaid kas õhusõiduki jõuallika abil või väliste jõudude toimel (näiteks tõusvad õhuvoolud). Kõige lihtsama mudeli kohaselt vaadeldakse õhusõidukile mõjuvatena nelja põhijõudu – raskusjõudu, tõstejõudu, takistusjõudu ja tõmmet. Lihtsaimas mudelis rakenduvad kõik need jõud ühte punkti – õhusõiduki raskuskeskmesse. Vaatleme neid jõudusid lähemalt:
Raskusjõud on teiste sõnadega Maa gravitatsioonijõud, mis on alati suunatud maakera tsentri poole ja on võrdne keha (õhusõiduki) massi ja raskuskiirenduse korrutisega. Seda korrutist võib nimetada ka kaaluks, kuid kaal avaldub vaid juhul, kui raskusjõud on mõne teise jõu poolt kompenseeritud. Kui kompensatsiooni pole, siis tekib vaba langemine ja kaaluta olek.
Tõstejõud, mis tegelikult on aerodünaamilise kogujõu üks komponent, leiab sageli kasutamist raskusjõu tasakaalustajana lennunduses. Siit ei tohi aga teha järeldust, nagu peaks tõstejõud alati mõjuma ülespoole või olema risti maapinnaga. Tõstejõud mõjub risti õhuvooluga ja selle suunal pole iseenesest midagi ühist ei raskusjõu suuna maapinnaga. Sobivas konfiguratsioonis on tõstejõud aga võimas vahend raskusjõu kompenseerimiseks.
Takistusjõud tekib keha liikumisel läbi õhu ja selle jõu esmaseks põhjuseks on õhu hõõrdumine vastu keha, kuigi hõõrdumine pole kaugeltki kõige suurem takistuse komponent. Kogutakistus sisaldab palju komponente ja selle tekkimine on keerukas. Võib küll väita, et suurt rolli keha takistuses määravad selle keha poolt tekitatud õhukeerised.
Tõmme on jõud, mida tekitab õhusõiduki jõuallikas. Jõuallikas võib tõmmet tekitada mitut moodi – propelleriga, ventilaatoriga või reaktiivjoaga. Oluline ühine joon on seejuures, et jõuallikas paneb õhu liikuma ühes suunas ja selle tagajärjel tekib vastassuunaline jõud, mis võib ka tööd teha ükskõik millises suunas, kui tõmbe tekitaja suunda muuta.
Järgnevalt vaatleme mehitamata õhusõidukite põhitüüpe ja põhijõudude jaotust nende tüüpide erinevate lennurežiimide korral.
Erinevad mehitamata õhusõidukite tüübid
Jäigatiivaline tüüp
Seda tüüpi võib nimetada ka klassikalise lennuki tüüpi õhusõidukiks. Sellel tüübil on statsionaarne tiib, mis nagu lennukilgi avaldab liikumisel tõstejõudu, mida kasutatakse raskusjõu kompenseerimiseks (Joonis. 2). Horisontaallennus peabki tõstejõud olema võrdne lennuki raskusjõuga ja mootori tõmme peab kompenseerima takistusjõu.
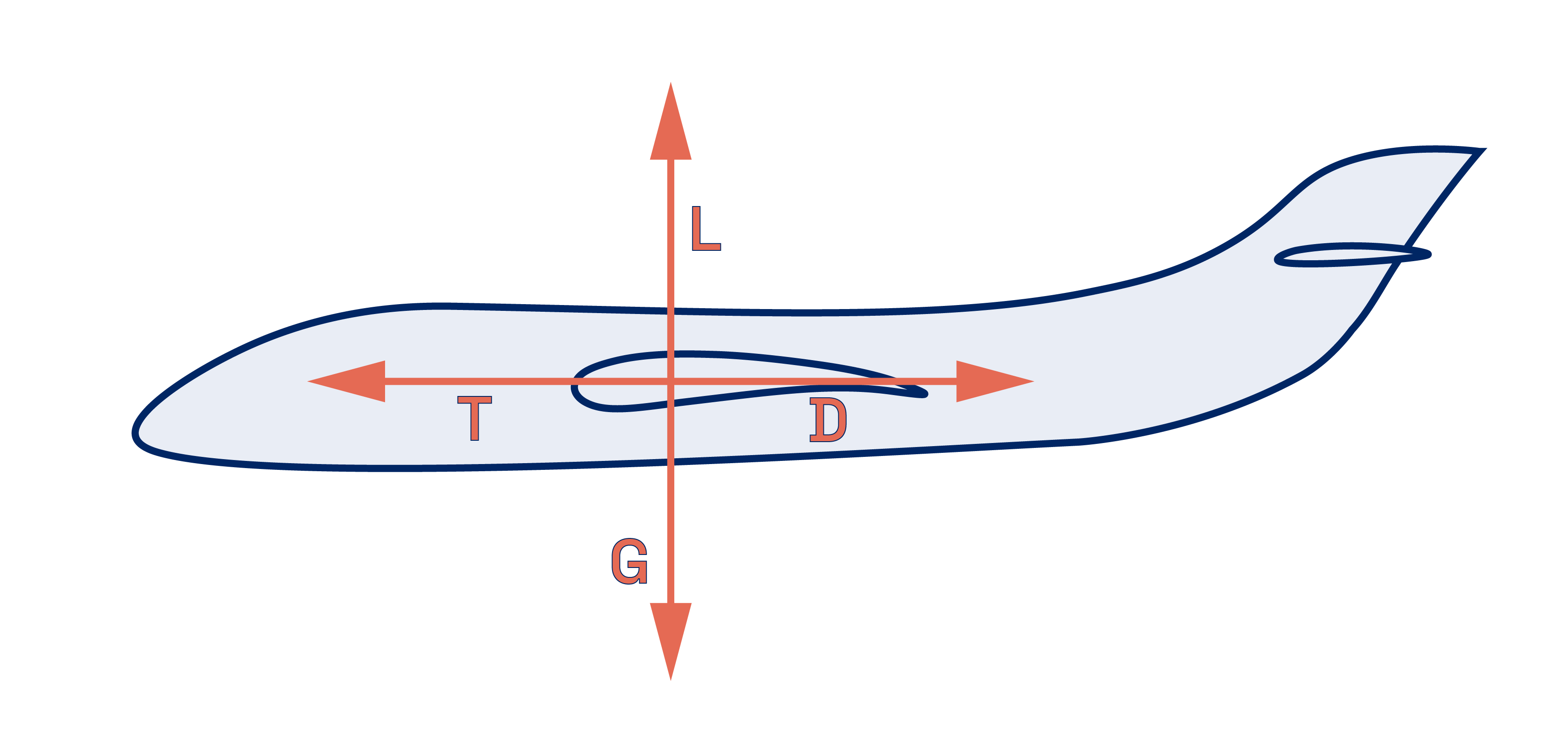
Joonis 2. Jõudude jaotus jäigatiivalise õhusõiduki horisontaallennul
Kui taoline õhusõiduk peaks kõrgust võtma, siis tuleb arvestada, et tööd saab teha vaid tõmme, seega peab tõmme olema takistusjõust suurem raskusjõu komponendi G2 võrra (Joonis 3). Tõstejõud aga, nagu jooniselt näha, on hoopis väiksem sellest, mis ta on horisontaallennus, sest see peab kompenseerima vaid raskusjõu komponendi G1, mitte aga tervet raskusjõudu. Jäigatiivalise tüübi puuduseks on nagu lennukilgi asjaolu, et see nõuab stardiks ja maandumiseks teatavat pikemat teekonda ja ei ole suuteline sooritama ripplendu.
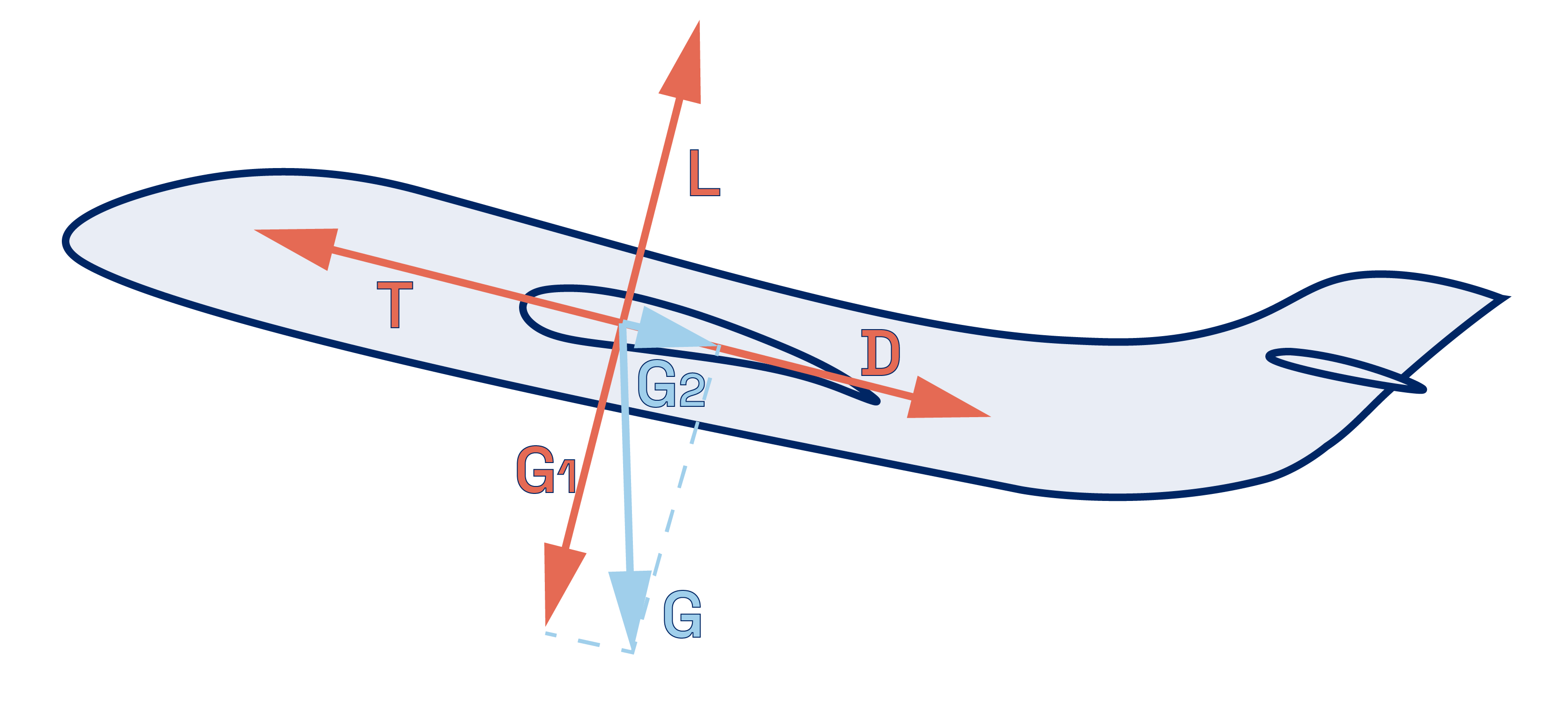
Joonis 3. Jõudude jaotus jäigatiivalisel õhusõidukil kõrgust kogudes
Pöördtiivaline tüüp
Seda tüüpi võib nimetada ka helikopteri tüübiks ja enamik tsiviilkäibes kasutatavaid mehitamata õhusõidukeid on just seda tüüpi. Selle tüübi puhul kasutatakse raskusjõu kompenseerimiseks jõuallika poolt tekitatud tõmmet, mida tekitatakse ühe või mitme horisontaaltasandis pöörleva propelleri (rootori) abil.
Põhiliseks erinevuseks eelmise tüübiga on asjaolu, et sellisel juhul on võimalik raskusjõudu kompenseerida ka paigalseisus (st. ripplennus) ja ka vertikaalsel tõusul ning laskumisel, sest jõuallika tõmbe tekitamine ei vaja õhusõiduki liikumist õhus. Ripplennus ei mõjugi õhusõidukile muid jõudusid kui vaid raskusjõud ja tõmme, mis peavad olema omavahel võrdsed (Joonis 4a)

Joonis 4. a- pöördtiivaline tüüp ripplennus ja b- horisontaallennus.
Horisontaallennu sooritamiseks tuleb tõmmet liikumise suunas kallutada, et sellele tekiks liikumissuunaline komponent, mis võiks teha tööd takistusjõu vastu (Joonis 4b). See saavutatakse kas rootori(te) või terve õhusõiduki kallutamisega liikumise suunas. Pöördtiivalise tüübi eeliseks on vertikaalse stardi ning maandumise ja ripplennu võimekus, puuduseks aga väiksem horisontaallennu kiirus, väiksem õkonoomsus ja lennuulatus.
Hübriid-konfiguratsioon
Selles tüübis on püütud ühendada mõlema eelneva tüübi positiivseid omadusi – ühest küljest ripplennu võimekust ja teisest küljest suuremat horisontaallenu kiirust ja lennuulatust. Selle tüübi esindajateks suures lennunduses võib pidada konvertiplaane ( näit.Osprey) ja ka vertikaalstardiga reaktiivhävitajaid (näit. Harrier ja F-35B). Sellise tüübi puhul on õhusõidukil olemas nii tiib tõstejõu tekitamiseks kui ka võimas jõuallikas, mille tõmbe suunda saab suures ulatuses muuta (võivad ka olla eraldi jõuallikad erinevate suundade kohta). Seega saavutatakse sellise tüübi puhul start ja maandumine nagu helikopterilgi, kuid horisontaallennus kasutatakse kogu tõmme ära takistuse ületamiseks ja õhusõiduk lendab nagu tavaline lennuk. Kõige keerukamaks lennuetapiks kujuneb aga üleminekurežiim, mille jõudude jaotus on kujutatud joonisel 5.
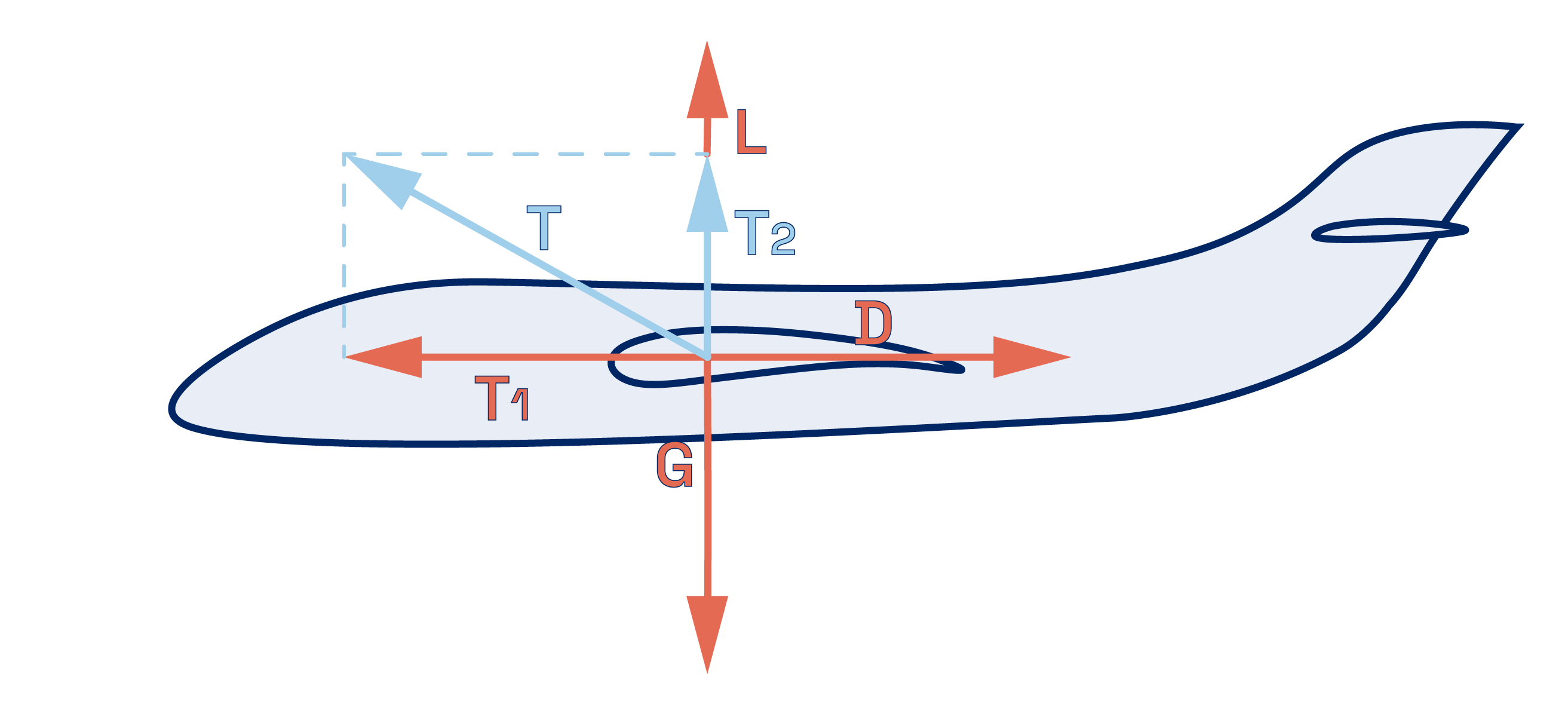
Joonis 5. Hübriid-konfiguratsioonis õhusõiduki üleminekurežiim.
Üleminekurežiimis kompenseerivad raskusjõudu nii tõmbekomponent T1 kui ka tõstejõud, mis väikese kiiruse tõttu pole veel küllaldane ise raskusjõudu kompenseerima. Takistusjõu kompenseerib aga tõmbekomponent T2, mis aga ei suuda õhusõidukit veel nii kiiresti liigutada kui täielikul horisontaallennul, kus kogu tõmbe võib rakendada takistusjõu vastu. Hübriid-konfiguratsiooni eeliseks on tõepoolest mõlema eelnevalt vaadeldud lihttüübi heade omaduste kooslus (st.horisontaallennu kiirus ja ripplennu võimekus), kuid puuduseks on nii mehaanika kui ka juhtimissüsteemi oluliselt suurem keerukus ja sellest tulenevalt ka oluliselt kõrgem hind.
Selleks, et sooritada edukat lendu, on vaja jälgida mitmeid olulisi tingimusi. Igal õhusõidukil on oma lõplik jõuallikate võimekus ja sellest tulenevalt on igal õhusõidukil ka mingi maksimaalne lennukaal, millega on lennu sooritamine võimalik. See määrab omakorda maksimaalse kasuliku lasti suuruse, mida on antud õhusõidukiga võimalik transportida. Ka lubatud lennukaalu raames peab arvestama, et mida suurem on õhusõiduki mass, seda väiksem on selle maksimaalne lennukaugus ja ka manööverdamise võimekus. Maksimaalne lennukaal määratakse üldjuhul õhusõiduki tootja poolt. Kasuliku lasti suurus pole aga ainus oluline parameeter, mida õhusõiduki lastimisel peab arvestama. Kõigi õhusõidukite puhul on oluline ka lasti paigutus (jaotus) õhusõidukil, sest õhusõiduki raskuskese peab lennu edukaks sooritamiseks jääma teatud piiridesse. See on oluline õhusõiduki tasakaalu, püsivuse ja juhitavuse kindlustamise seisukohast.Mehitamata õhusõiduki last ja komponendid
Tasakaal
Õhusõidukil nagu igal kehal on kolm pöörlemistelge, mis on omavahel risti ja läbivad raskuskeset (Joonis 6)
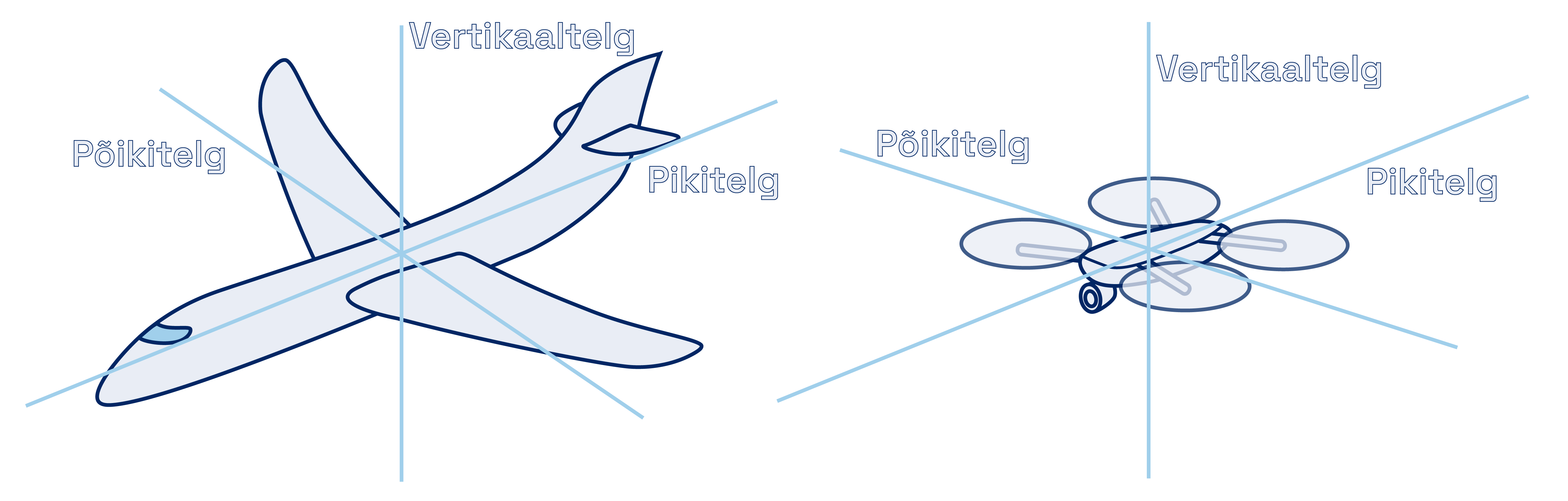
Joonis 6. Õhusõiduki teljed.
Õhusõiduk võib pöörelda ümber kõigi kolme telje. Tasakaaluks mingi telje suhtes nimetame olukorda, kus õhusõiduk ümber selle telje ei pöörle (st. on tasakaalus). Täielik tasakaal realiseerub olukorras, kus õhusõiduk ei pöörle ümber ühegi telje. On arusaadav, et taoline olukord on nõutav õhusõiduki satabiilsete lennurežiimide korral nagu horisontaallend, ripplend, kõrguse võtmine, laskumine.
Püsivus
Tasakaalu võib olla mitut liiki. Kui süsteem tasakaalust välja viia ja seejärel süsteem omab tendentsi esialgne tasakaaluasend taastada, siis selle kohta öeldakse, et tegemist on püsiva tasakaaluga. Õhusõidukid püütakse konstrueerida nii, et nad oleksid püsivad kõigi kolme telje suhtes. See tähendab, et kui mingi väline mõju rikub tasakaalu mingi telje suhtes, siis õhusõiduk omab tendentsi see tasakaal taastada ilma juhtimiseta (st. ilma piloodi või autopiloodi vahelesegamiseta).
Juhitavus
Juhitavuseks nimetatakse õhusõiduki võimet vastavalt piloodi või autopiloodi tegevusele muuta õhusõiduki nurka ümber ühe, teise või kolmanda telje. On arusaadav, et juhitavus ja püsivus on teatud mõttes vastandlikud omadused. Suur püsivus raskendab juhtimist, sest õhusõiduk püüab endist tasakaaluolekut taastada. See tähendab, et ei ole võimalik saavutada ühtaegu väga head püsivust ja väga head juhitavust. Iga õhusõiduki jaoks püütakse vastavalt õhusõiduki eesmärgile leida optimaalne püsivuse ja juhitavuse vahekord.
Lennuki tüüpi õhusõidukitel on püsivuse ja juhitavuse küsimus küllaltki edukalt lahendatud. Lahendatud on suures lennunduses see küsimus ka helikopterite jaoks. Mehitamata õhusõidukite puhul kohtame pöördtiivalise tüübina aga põhiliselt multirootor tüüpi õhusõidukeid, mille rootoritel puuduvad labade seadenurga automaadid, mis on olemas suurtel helikopteritel. Sellel põhjusel on multirootori tüüpi õhusõidukid üldjuhul ebapüsivad vähemalt kahe telje suhtes. Seetõttu pole ükski multirootori tüüpi õhusõiduk võimeline lendama ilma autopiloodi pideva sekkumiseta. Seega on multirootorite puhul realiseeritud olukord, kus püsivuse puudumine on kompenseeritud ülikiire ja täpse juhtimisega. Siit ka üldisem järeldus – püsivuse puudumist on alati võimalik kompenseerida vastava kiiruse ja täpsusega juhtimisega. Seda juhtimist teostab muidugi autopiloot, sest sedavõrd kiire ja täpne juhtimine käib üle inimvõimete piiri.
Sellegipoolest on õhusõiduki raskuskeskme asukoht väga oluline õhusõiduki edukaks tegevuseks lennul. Põhimõtteliselt on raskuskeskme asukoha piirid tarvis paika panna kõigi kolme telje suhtes, et oleks tagatud õhusõidukile vajalik tasakaal, püsivus ja juhitavus. Ka raskuskeskme asukoha piirid paneb antud õhusõiduki jaoks paika üldjuhul selle tootja. Õhusõiduki lastimisel on aga lisaks lasti kaalule ja raskuskeskme asukohale vahel tarvis arvestada ka lasti gabariitidega. Tõepoolest, last võib kaalu poolest ja ka raskuskeskme asukoha poolest olla antud õhusõidukile sobiv, kuid lasti gabariidid ja kuju võivad oluliselt mõjutada õhusõiduki aerodünaamilisi omadusi. On selge, et rikutud aerodünaamilise kujuga õhusõiduk kaotab oma sooritusvõimes, äärmistel juhtudel kaotab aga lennuvõime üldse. Äärmiselt oluline ka lasti korrektne kinnitamine õhusõidukil, sest ebakindla kinnituse tõttu võib last õhusõidukilt kas eralduda või muuta oma asukohta ja seetõttu rikkuda õhusõiduki tasakaalu, püsivust või juhitavust. Kokkuvõtvalt: Õhusõiduki lastimisel on vaja jälgida:
Lasti kaalu
Lasti kaalu jaotust õhusõidukil
Lasti gabariite
Lasti nõuetekohast kinnitust
Pardaseadmed
Autopiloot
Mehitamata õhusõidukite autopiloot, mis juhib kogu süsteemi toimimist ja käitub nagu õhusõiduki „aju“, vajab arvutuste tegemiseks ning drooni stabiliseerimiseks sisendit erinevatelt sensoritelt. Sensorid annavad autopiloodile infot drooni asukoha, asendi, kiiruste, kiirenduste ja ümbritseva suhtes. Nagu eelnevalt mainitud, on mitme rootoriga õhusõiduki puhul autopiloot asendamatu, kuna süsteem ise on aerodünaamiliselt ebastabiilne ja ilma pideva autopiloodi sekkumiseta ei oleks lend võimalik.
Inertsiaalandur - IMU
Esimeseks ja kõige olulisemaks sensoriks on inertsiaalandur (IMU – Inertial Measurement Unit). IMU koosneb güroskoopidest ja kiirendusanduritest. Güroskoobid annavad autopiloodile infot drooni nurkkiiruste kohta kolme telje suhtes. Seega güroskoopide abil on võimalik autopiloodil oma asendit hoida iseenda suhtes. Selline stabiliseerimine toimub näiteks racer droonide ACRO lennureziimis, kus droon ei hoia ennast maapinnaga paralleelselt vaid kontrollsisendite puudumisel püüabki hoida oma asendit iseenda suhtes. Ainult güroskoopide abil lendamine on aga keeruline ning kaugpiloot peab ise pidevalt korrigeerima, et droon üldse õhus püsiks.
Kiirendusandurid mõõdavad drooni kiirendust kolme telje suhtes. Kiirenduse mõõtmine on oluline maakera gravitatsiooni tajumiseks. Selle abil saab autopiloot drooni hoida maaga paralleelselt ning seeläbi tajuda oma asendit lisaks ka maapinna suhtes. Kiirendusandurite abil piirab droon kaldenurga maapinna suhtes turvalisele tasemele.
Kompass
Kompass on samuti oluline seade, selle kaudu saab autopiloot informatsiooni oma suuna kohta maakera suhtes. Kompassiga mõõdetakse maa magnetvälja ning selle abil saab autopiloot kindlaks teha drooni kursi.
Baromeeter
Kõrguse mõõtmiseks on droonidele paigutatud baromeeter, mis mõõdab õhurõhku. Kuna õhurõhk väheneb kõrguse kasvades, on võimalik õhurõhu abil hinnata drooni kõrgust. Rõhu järgi kõrguse hindamine aga ei toimi kuigi hästi siseruumides ning ka välitingimustes ei ole väga täpne, kuid on siiski
Satelliitnavigatsioon - GNSS
Seni oleme kirjeldanud erinevaid seadmeid, mis on vajalikud drooni stabiliseerimiseks. Absoluutse geograafilise positsiooni leidmiseks on lisaks veel kasutusel satelliitnavigatsioon (GNSS – global navigation satellite system), laiemalt levinud nimetusega GPS (global positioning system). Satelliitnavigatsiooni abil on võimalik positsioneerida õhusõiduk paarimeetrise täpsusega. Koostöös teiste anduritega suudab autopiloot hoida õhusõidukit paigal (multirootori puhul) ning lisab mitmeid funktsioone, nagu näiteks automaatne kodupunkti naasmine ja maandumine, etteplaneeritud marsruuti mööda lendamine, tuulistes tingimustes drooni asendi säilitamine jpm.
Satelliitnavigatsiooni edukaks kasutamiseks peab olema droonil hea ja takistamatu vaateväli otse üles, kuna just ülal asetsevatelt satelliitidelt saab ta positsioneerimiseks vajaliku info. See tähendab, et siseruumides ning näiteks sügavates orgudes või tiheda metsa all võib satelliidilt tulnud signaal olla liiga nõrk, et saavutada piisav täpsus. Selle tõttu on ka GNSSi antenn mehitamata õhusõidukitel paigutatud alati korpuse ülemisse osasse, et drooni enda tõttu tekitatud häireid vähendada.
Takistuste vältimine
Lisaks eelnimetatud anduritele võib leida moodsamate droonide pealt veel seadmeid, mis aitavad veelgi enam tagada turvalist lendu. Näiteks kasutatakse kauguse mõõtmiseks infrapuna või ultraheli andureid. Enamasti paiknevad need drooni all ning neid kasutatakse maandumise ja õhkutõusu ajal täpsema kõrgusinfo saamiseks. Takistuste vältimiseks kasutatakse stereokaameraid, mille abil suudab drooni autopiloot tajuda drooni ümbritsevaid füüsilisi takistusi ning vältida nendega kokku põrkamist.

Joonis 7. Droon, mis kasutab takistuste tuvastamiseks stereokaameraid.
Sensoorikast kokkuvõtteks:
- IMU – inertsiaalandur, mis omakorda koosneb
- Güroskoop – mõõdab nurkkiirusi kolme telje suhtes
- Kiirendusandur – mõõdab kiirendust kolme telje suhtes
- Kompass – mõõdab maakera magnetvälja suunda
- Baromeeter – mõõdab kõrgust õhurõhu kaudu
- GNSS (GPS) – leiab asukoha satelliitide kaudu
- Infrapuna või ultraheli andur – mõõdab kaugust maapinnast või takistustest
- Stereokaamera – tuvastab takistusi ning aitab vältida kokkupõrkeid
Drooni jõuallikad
Lisaks paljudele sensoritele on droonidel ka mootorid, ilma milleta oleks lend võimatu. Mootoreid on vaja, et liigutada propellereid või rootoreid, mis seeläbi tekitavad aerodünaamilise jõu. Tänapäevaste mehitamata õhusõidukite mootorid on enamasti harjadeta elektrimootorid (BLDC – Brushless Direct Current motor). Sellistel mootoritel on väga hea töökindlus, kuna liikuvaid osi on vähe ning hõõrdetakistus on väga väike (võrreldes harjadega elektrimootoriga). Harjadeta mootorite puhul on tarvis aga elektroonilist kiirusregulaatorit (ESC – electronic speed controller), mis juhib ja kontrollib mootori pöörlemiskiirust.
Suuremate mehitamata õhusõidukite puhul võidakse kasutada ka sisepõlemismootorit. Vedelkütusega töötava mootori eeliseks on kasutatava kütuse suur energiatihedus. Seetõttu saavad võrreldava suurusega sisepõlemismootoriga õhusõidukid elektriajamiga droonidest kauem lennata.
Kaamera stabiliseerimine - gimbal
Kuna õhusõiduk muudab lennates pidevalt oma asendit, tuleb arusaadava kaamerapildi saavutamiseks kasutada stablilisaatorit ehk gimbali. Gimbal koosneb väikestest mootoritest ja konstruktsioonist, mis lubavad liigutada kaamerat erinevate telgede suhtes.

Joonis 8. Kolmeteljeline kaamera gimbal
Kolmeteljeline gimbal suudab hoida kaamera paigal kõige kolme telje suhtes, st et ei ole vahet mis suunas droon liigub, kaamerapilt püsib stabiilsena. Kaheteljeline gimbal enamasti kompenseerib liikumisi nii piki- kui põikitelje suhtes, kuid vertikaaltelg on paigal. Vertikaalteljes stabliliseerimise puudumine tähendab seda, et kui droon pöörab oma nina vasakult-paremale, ei ole pilt kuigi stabiilne. Üheteljeline gimbal suudab stabiliseerida kaamerapilti vaid ühes suunas, näiteks pikitelje suhtes. See tähendab, et kaamerapilt on stabiliseeritud drooni vasakule ja paremale kallutamise suhtes.
Mehitamata õhusõidukite akud
Mehitamata õhusõidukite kasutamisel on väga oluline teada, kuidas nende toiteallikaid ohutult ja efektiivselt kasutada. Selles peatükis tutvustatakse erinevaid akude tüüpe, nende iseärasusi ja terminoloogiat ning peamisi juhiseid akude ohutuks ja säästvaks käitlemiseks.
Akude terminoloogia
Akusid saab kirjeldada mõne lihtsa parameetri abil. Esimeseks akude iseloomulikuks tunnuseks on aku pinge. Aku pinge on elektrivälja potentsiaalide vahe aku kahe äärmise kontakti vahel. Mehitamata lennunduses kasutatakse enamasti mitmest elemendist koosnevaid akusid ning aku pinge sõltub elementide arvust ühes akus.
Näiteks võib koosneda aku kolmest jadamisi (inglise keeles in series) asetatud elemendist, mille tulemusel on aku pinge kolm korda kõrgem ühe elemendi pingest. Sellist akut nimetatakse 3S akuks.
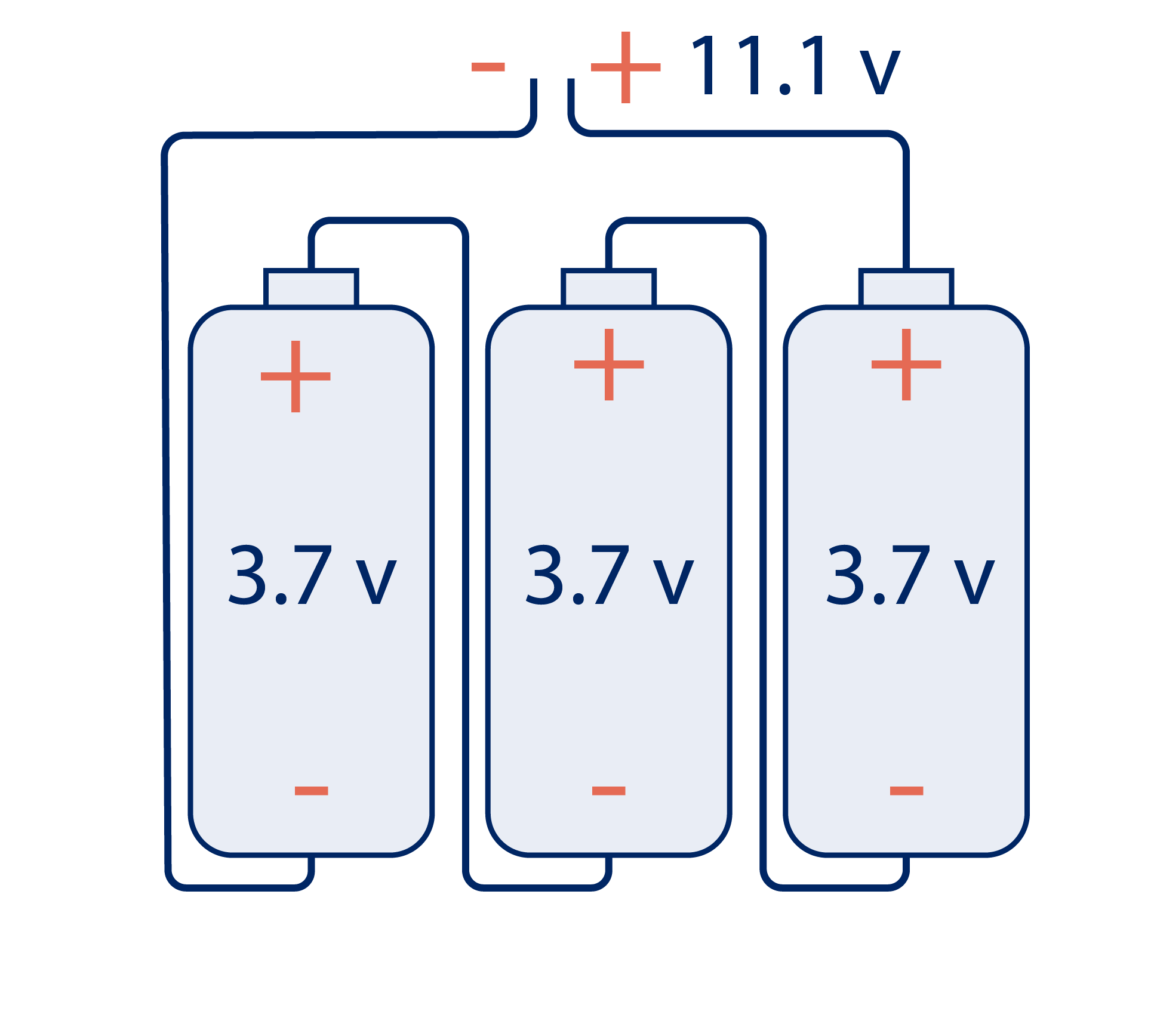
Joonis 1. Kolmest jadamisi ühendatud elemendist koosnev "3S" aku
Suurematel ja raskematel droonidel on kõrgema pingega akud, et oleks võimalik kanda üle korraga võimalikult suuri võimsusi. Väikesed, sisetingimustesse mõeldud droonid kasutavad enamasti 1-2 elemendiga akusid, levinud kaameradroonid 3-6 elemendiga akusid ning suuremad professionaalsed droonid juba 12 ja enama elemendiga akusid.
Teiseks iseloomulikuks akude tunnuseks on mahutavus. Mahutavus väljendab täis laetud aku elektrilaengut, mida mõõdetakse (milli)ampertundides. Aku mahutavus näitab, kui suure voolutugevusega voolu suudab aku kindla ajaühiku jooksul välja anda.
Joonis 2. Mahutavuse arvutamise valem
Näiteks 2000 mAh (2 Ah) mahutavusega aku suudab välja anda ühe tunni kestel 2 A suurust voolutugevust või näiteks nelja tunni kestel 0.5 A suurust voolutugevust.
Akude iseloomustamiseks on kasutusel ka kolmas mõõtühik, mis iseloomustab akusid paremini kui mahutavus - elektrienergia. Mahutavus hõlmab vaid aku poolt välja antava voolutugevuse suurust aja suhtes. Elektrienergia sõltub aga ka aku pingest, mistõttu on see mõõtühik parem viis akude iseloomustamiseks, kuna kirjeldab aku energia- potentsiaali. Elektrienergiat mõõdetakse vatt- tundides (Wh). Aku elektrienergia suuruse saab arvutada, kui korrutada aku pinge mahutavusega. Elektrienergia näitab seda, kui suure võimsusega suudab aku kindla ajaühiku jooksul töötada.
Joonis 3. Aku energia valem
Näiteks saab 100 Wh aku anda välja 100 W võimsusega elektrienergiat 1 tunni jooksul või näiteks 20 W võimsusega elektrienergiat 5 tunni jooksul.
Veel üks oluline parameeter, mida akude puhul silmas pidada, on aku C-väärtus. See iseloomustab seda, kui suurt voolutugevust suudab aku välja anda, ilma et aku üle kuumeneks või kahjustuks. Multirootor tüüpi droonid tarbivad enamasti rohkelt elektrienergiat suurte voolutugevuste juures, mistõttu on aku C-väärtus ülioluline, et käitada droone turvaliselt.
C-väärtuse kaudu saab leida aku maksimaalse voolutugevuse, korrutades C-väärtuse aku mahutavusega.

Joonis 4. LiPo aku
Näiteks 30 C aku, mille mahutavus on 2.5 Ah, suudab välja anda kuni 75 A suurust voolutugevust (2.5 * 30 = 75 A). Mõistagi saab sellise voolutugevuse juures aku väga kiiresti tühjaks.
Samas peab silmas pidama, et enamasti ei saa akusid sama suure voolutugevusega uuesti täis laadida. Enamikke liitiumakusid tuleb reeglina laadida 1 C suuruse voolutugevusega, mis tähendaks 2.5 Ah suuruse aku puhul 2.5 A voolutugevust. Täpsema info iga aku turvalise laadimise kohta leiab aku või drooni kasutusjuhendist.
Kui on teada aku pinge, mahutavus ja C-näitaja, saab välja selgitada ka maksimaalse aku võimsuse. Aku võimsus on aku pinge ja maksimaalse voolutugevuse korrutis ning seda mõõdetakse vattides. Näiteks kui eelmises näites toodud aku maksimaalne voolutugevus oli 75 A ning aku pinge 4S konfiguratsioonis on 14.8 V, siis korrutades pinge maksimaalse voolutugevusega, saame sellise aku võimsuseks 1110 W ehk 1.11 kW.
Akude tüübid
Erinevad akude keemilised koostised
Tänapäevased elektroonikaseadmed kasutavad enamasti liitiumakusid. Need omakorda liigituvad veel kaheks kategooriaks - liitiumioon (LiIo) ja liitiumpolümeer (LiPo). Varasemalt kasutati ka nikkelmetallhüdriid (NiMH) akusid, kuid tänapäeval neid enam üldjuhul seadmetest ei leia.

Joonis 5. Erinevad liitiumakud.
Liitiumpolümeer akud, lühidalt ka LiPo akud, on väga laialt levinud just multirootorite hulgas, kuna mitme rootoriga droonide jaoks on vajalik aku poolt võimaldatav kõrge voolutugevus, hea mahutavus ning kerge kaal. Hetkel on LiPo akud selleks kõige sobilikumad.
Liitiumioon (LiIo) akudel on enamasti madalam C-väärtus ja neid kasutatakse enamasti jäigatiivalistes ehk lennuki tüüpi õhusõidukites, kus hetkeline voolutarve ei kasva kuigi kõrgeks. Sarnaselt LiPo akudega, on ka sellel akutüübil väga hea eneriga ja kaalu suhe.
Nikkel-metall-hüdriid akud on tänapäeval harva kasutusel, kuid mõni vanem seade võib veel seda tüüpi akut kasutada. Nikkelakude põhiliseks mureks on mäluefekt - kui akut iga kord täiesti täis laadida ja seejärel täiesti tühjaks tarbida ei ole võimalik, siis väheneb aku mahutavus märgatavalt iga laadimis-tühjenemise tsükli järel.
Nutikad akud
Liitiumakusid - nii liitiumioon kui ka liitiumpolümeer akusid - saab veel omakorda liigitada kaheks kategooriaks. Sõltuvalt aku ehitusest on olemas tavalised ja nö nutikad akud.
Tavaline liitiumaku on ilma igasuguse lisanduva tehnoloogiata või tarkvarata aku. Enamasti koosnevad need vaid aku elementidest, voolupistikust ning laadimise pistikust. Selliseid akusid kasutavad iseehitatud hobidroonid ja muud iseehitatud seadmed. Nende akude kasutamise teeb keerulisemaks asjaolu, et puudub igasugune kaitse akut rikkuda ehk kogu vastutus ohutuse tagamisel langeb aku kasutajale.

Joonis 6. Lihtsa ehitusega liitiumaku
Paljudes uuemates mehitamata õhusõidukites kasutatakse aga pisut nutikamaid akusid. Sellistele akudele on juurde lisatud mikrokontroller, mille abil saab enamasti kuvada aku täituvusastet. Sõltuvalt akust võivad sellel olla sisseehitatud funktsioonid ka lühiste, üle- ja alapinge kaitseks ning võimalus akut iseeneslikult soojendada. Iga tootja akud on pisut erinevad, seega tuleb alati enne akude kasutamist põhjalikult tutvuda konkreetse kasutus- juhendiga.

Joonis 7. Nutika akuga droon.
Akude kasutamine
Akude kasutamisel tuleb lähtuda aku ning mehitamata õhusõiduki kasutusjuhendist.
Enne igat lendu tuleb veenduda, et aku on lennuks sobivas seisus. Põhiliselt tuleks pöörata tähelepanu järgmistele aspektidele:
Aku laetusaste
Paljudel akudel on peal indikaator, mis näitab seda lihtsa nupuvajutusega. Lendu tuleks alustada vaid täiesti täis laetud akuga. Tühja akuga lennu alustamine tähendab märgatavalt lühemat lennuaega ning selle tõttu võib tekkida ohtlikke olukordi.Enamik laiatarbe droone näitab süsteemi sätetest ka iga aku elemendi pinget eraldi. Enne lennu alustamist, ja ka siis, kui kahtlustad aku vigastust, tuleks kontrollida, kas kõik aku elemendid on ühtlase pinge juures. Kui on märgatav erinevus elementide pingetes, tuleks aku kasutusest kõrvale jätta (kerge, näiteks 0.1-0.2 V erinevus elementide pingetel on normaalne).
Visuaalne kontroll
Oluline on vaadata aku üle enne kasutamist, et ei esineks füüsilisi vigastusi nagu mõrad, praod, mõlgid, pundumine või muud deformatsioonid. Vigastatud akut ei tohi kindlasti kasutada, see tuleb eraldada töökorras akudest ning viia seejärel turvaliselt jäätmejaama.Vigastatud aku võib iseeneslikult või koormuse all kiiresti tühjeneda, paisuda, põlema süttida või drooni aku kinnitustest lahti tulla. See võib endaga kaasa tuua drooni soovimatu käitumise lennu ajal, lennuülesande mittesooritamise või lausa drooni alla kukkumise.
Aku tsüklite arv
Moodsamad akud näitavad süsteemis aku laadimis-tühjenemise tsüklite arvu. Mida enam on akut laetud ja tühjendatud, seda väiksem on aku efektiivne mahutavus. Suure tsüklite arvuga akut võib kasutada, kuid sel juhul tuleb arvestada lühema lennuajaga.Aku temperatuur
Külma ilmaga drooni lennutades tuleb arvestada, et akude jõudlus väheneb - mida madalam on temperatuur, seda väiksem on aku jõudlus. Lisaks on külmad akud tundlikumad suurtele voolutugevustele, mida põhjustavad nõudlikumad lennumanöövrid. Selle tagajärjel võib aku pinge järsult langeda ja halvimal juhul võib droon end liigse koormuse tagajärjel välja lülitada.Lubatud aku töötemperatuurid leiab toote kasutusjuhendist, paljud droonid ei ole mõeldud kasutamiseks suurte miinuskraadidega.
Jaheda ilmaga droone käitades tuleks hoida akusid kindlasti soojas ning kinnitada need droonile vahetult enne lennu alustamist. Akude soojas hoidmine aitab vältida külma ilma mõjusid.
Laadimine ja hoiustamine
Liitiumakude laadimiseks tuleb alati kasutada vastava aku laadimiseks mõeldud laadijat. Kui aku või drooniga tuli kaasa spetsiaalne laadija, siis tohib kasutada vaid seda seadet aku laadimiseks. Kui laadida tavalist liitiumakut, siis tuleb tähele panna, et laadijal peab olema vastava aku jaoks eraldi režiim ning tootja poolt sätestatud piire, näiteks laadimispinget ja voolutugevust, ei tohi ületada.
Aku võib saada pöördumatuid kahjustusi, kui laadimisel ületatakse akule ettenähtud maksimaalset pinget. Ülepinge puhul võib aku sisemiselt kahjustuda niivõrd ulatuslikult, et tekib lühis kas laadimise või kasutamise ajal. Akusid ei ole soovituslik ka liiga tühjaks lasta, kuna tavaliselt akud oma täit mahutavust selle tagajärjel enam ei saavuta. Olenevalt aku tühjenemise astmest võib juhtuda, et akut enam ei olegi võimalik laadida, kuna sisekeemia on pöördumatult kahjustunud.
Enamik tänapäevaste droonide akusid on aga piisavalt targad, et kaitsevad aku elemente üle- ning alapinge eest.
Akusid ei tohi ka jätta laadima ilma järelevalveta. Laadimine on üks ohtlikumaid etappe aku kasutamise juures ning selle käigus võib tekkida põleng, millele on tarvis kiirelt reageerida.
Liitiumakusid ei ole mõistlik hoiustada täiesti täis laetuna ega ka täiesti tühjana. Kõige parem on jätta aku ca 60-70% laetustaseme juurde, ehk ca 3.8V iga aku elemendi kohta. See tagab, et aku maksimaalne mahtuvus säilib ka üle pika aja. Kui on plaanis aku üle paari päeva riiulisse seisma jätta, siis tuleks aku pinge jätta ettenähtud hoiustamispinge tasemele. Selleks on paljudel laadijatel eraldi režiim, üldiselt storage nime all.

Joonis 8. Aku hoiustamispinge juures
Paljude droonide akudel on hoiustamise režiimile ülemineku võimekus juba sisse ehitatud ning kasutaja saab ise määrata, mitu päeva pärast laadimist aku täis püsib. Pärast etteantud aja möödumist hakkab aku ennast vaikselt tühjendama, kuni on saavutanud soovitud pinge. Seda, kas selline funktsioon on olemas ka Teie drooni akudel, tuleb kontrollida kasutusjuhendist.
Kui akudel on olemas isetühjenemise funktsioon, siis tasub akud alati laadida 100% peale ning lasta akudel ise aja möödudes saavutada hoiustamiseks vajalik pinge.
Liitiumakude hoiustamiseks sobib kõige paremini tulekindel kott, et tagada ka ohutus pikaajalisel hoiustamisel. Akud tuleks asetada koti sisse ning kott omakorda eemale kergesti süttivatest materjalidest. Akud on küll ajas muutunud turvalisemaks, kuid siiski säilib iseenesliku süttimise oht nii kasutamise, laadimise kui ka hoiustamise ajal.
Kuidas käituda õnnetuse korral
Kui aku peaks süttima, siis tuleb arvestada, et liitiumaku põleng on väga intensiivne ja ohtlik protsess. Keemiliselt on põlemiseks vajalikud ained akus sees olemas, mis tähendab, et juba põlevat liitiumakut on väga keeruline kustutada kuna põleng ei vaja välist hapnikku.
Liitiumakude tulekahjusid liigitatakse klass D tulekahjuks, mis tähendab põlevat metalli. Tule summutamiseks võib kasutada vastava kategooria tulekustutit või proovida summutada tuld suure koguse liiva või veega. Tuleb aga siiski arvestada, et liitiumaku põlengut ei ole võimalik kustutada, vaid ainult põlemise intensiivsust vähendada.
Põlengu korral tuleb viivitamatult eemaldada kõik akut ümbritsev süttiv materjal, et tulekahju lõppeks võimalikult väheste kahjudega. Tuleb tähele panna, et kui süttis vaid üks aku element, siis suure tõenäosusega liigub põleng mööda elemente edasi. See võib tekitada olukorra, kus näiliselt juba peaaegu kustunud aku võib uuesti suure leegiga süttida.
Kokkuvõte
Erinevaid akusid tuleb käidelda ettevaatlikult ning kasutada neid ainult vastavalt kasutusjuhendile. Kui akude eest hoolt kanda, teenivad nad kasutajat pikalt ja usaldusväärselt.
Enesekontrollitest
Enesekontrollitesti saab teha klõpsates SIIN