
Maapealse riski tehniline ja käitamisalane maandamine
Lennu planeerimine
Tegureid, mida lennu planeerimisel arvestama peab, on mitmeid. Suures pildis võib need jagada kaheks. Üks osa neist on seotud õhuruumiga, ehk kõige sellega, mis on maa- või veepinna kohal ning teine osa sellega, mis jääb maapinnale lendamise ala alla ja kõrvale.
Eduka lennu läbiviimiseks, sh ohutuse tagamiseks on oluline hea situatsiooniteadlikkus lendamise ala kohta. Situatsiooniteadlikkuse alla kuulub näiteks teadmine, millised on lendamise alas kehtivad õhuruumi piirangud, millised on lendamise alas paiknevad maapealsed takistused või ohukohad, kas lendamise alas,nii õhus kui maa peal tegutseb teisi inimesi, loomi või õhusõidukeid lisaks minu enda tegevusele. Situatsiooniteadlikkust saab suurendada info kogumisega erinevatelt kaartidelt või kaardirakendustest ning lennundusteabe infoallikatest (näiteks AIP või NOTAM teated).
Õhuruum
Õhuruumi hinnates tuleb esmalt selgeks teha, kas antud asukohas on lendamine üldse lubatud. Teatud õhuruumi osades on igasugune lennutegevus kas täielikult või ajalise määranguga keelatud.
Kui tead, et õhuruumis, kus plaanid drooni lennutada, on lennutamine lubatud, tuleb ikkagi veenduda antud õhuruumi kasutamise reeglites ja võimalikes eripärades. Õhuruum tervikuna ei ole homogeenne! Värskeim info kehtivatest piirangutest ja muudatustest on leitav NOTAM teadetest, millega peavad kõik piloodid ja kaugpiloodid enne lendu tutvuma.
Oluline on arvestada sellega, et õhuruumi võib planeeritult või ka planeerimata kasutada ka keegi teine. See tähendab, et tuleb alati valmis olla kas teise õhusõiduki tekkimiseks või näiteks lindude tegevuseks planeeritud alas.
Maapealne ala
Maapealne ala ehk õhuruumi alla jääv ala vajab samuti tähelepanu. Sõltuvalt asukohast võib just maapealse ala hindamine ohutuks lendamiseks olla üsna keerukas.

Joonis 1. Erinevad maapealsed alad
Olulised elemendid, millele tuleb kindlasti tähelepanu pöörata, on kõikvõimalikud takistused. Olgu nendeks hooned, mastid, elektriliinid või muud rajatised ja objektid, mis otseselt võivad takistada õhusõiduki lendu. Samuti võivad nad piirata nähtavust. Hoonete või mõnede maastikuelementide vahel ning erinevalt soojenevate pindade (asfalt, katused, veepinnad) kohal võib esineda õhu liikumissuuna ja kiiruse muutusi ehk turbulentsi. Horisontaal- ja vertikaalsuunas liikuv muutlik õhk mõjutab aga õhusõiduki lennutrajektoori.
Teatud tingimused, nagu metallkonstruktsioonide rohkus, peegeldavad pinnad, veepinnad jms võivad mõjutada lennuvahendi sensoreid.
Stardi- ja maandumisala
Kuna stardi ja maandumise ajal on õhusõiduk maapinnale ning seal paiknevatele objektidele kõige lähemal, on ohutuse tagamiseks oluline parima, st ohutuima võimaliku stardi- ja maandumisala valik. Stardi- ja maandumisala peab olema kasutatava lennuvahendi jaoks piisavalt suur, takistustevaba ning tasane.
Mehitamata õhusõidukid kasutavad navigeerimiseks ja positsioneerimiseks erinevaid sensoreid ning satelliitnavigatsiooni. Seepärast on äärmiselt oluline veenduda, et valitud alas oleks piisavalt tugev satelliitnavigatsiooni levi ning et õhusõiduki kontrollimiseks vajaminev raadiosignaal ei saaks häiritud.
Häiringud võivad tekkida näiteks rohkete WiFi võrkude tõttu, sest mehitamata õhusõidukite juhtimiseks kasutatakse samasid raadiosagedusi, mida ka WiFi võrkudes. Nii droonide kui WiFi seadmete side kasutab sama sagedusvahemikku, milleks on 2.4 GHz - 5.8 GHz.
WiFi signaalide rohkus, mis esineb sageli tiheasustusaladel, võib mõjutada lennuvahendi juhtimist.
Selleks, et lennutegevusega mitteseotud inimesed ei satuks stardi- ega maandumisalasse, on heaks abinõuks ala selge tähistamine ja piiramine.

Joonis 2. Stardi- ja maandumisala märgistamine
Taaskord sõltuvalt asukohast, võivad ohutut lendamist segada kaugpiloodi tööalas või selle lähedal liikuvad sõidukid ja isikud. Tihedamini asustatud paikades ja maanteede läheduses lennates peab olema valmis, et nii sõidukid kui ka jalgsi liikujad võivad igal hetkel sattuda lennu alasse.
Üheks lahenduseks keerukamates asukohtades on lennutööle kaasata vaatleja. Vaatleja ülesandeks on tegeleda ohutuse tagamisega ning ümbruskonna kontrollimisega, eesmärgiga võimaldada kaupiloodil segamatult oma ülesannetele keskenduda.
Lennuks planeeritav ala
A2-alamkategoorias opereerimise ühe tingimuse, nimelt kõrvaliste isikute kohal mitte lendamise tagamine võib teatud asukohtades osutuda üsna keerukaks. Seetõttu on tihedalt asustatud piirkondades oluline leida lisaks ohutule maandumis- ja stardipaigale ka võimalikult väikese riskiga lennutrajektoorid.
Lennu kestel (lennu toimumisel ajal) peab alati olema valmis, et kõik ei lähe nii nagu planeeritud. Asukohast sõltuvaid võimalikke ohte ette nähes on suurem tõenäosus lend ohutult teostada või vajadusel katkestada. Lennu katkestamine suurelt horisontaalselt vahemaalt, seejuures kõrguse vähendamisega võib viia otsenähtavuse kadumiseni.
Üks oluline tegur multirootorite puhul, mida tuleb ohutuse seisukohalt arvestada nii lennuks planeeritavat ala hinnates kui ka lennu vältel, on lennuvahendi peatumisteekond.
Peatumisteekond sõltub nii õhusõiduki tüübist, võimekusest, ilmastikutingimustest (eelkõige tuulest) kui ka kaugpiloodi oskustest.
Peatumisteekond koosneb kahest komponendist. Üheks neist on pidurdusteekond ning teine reageerimisaeg.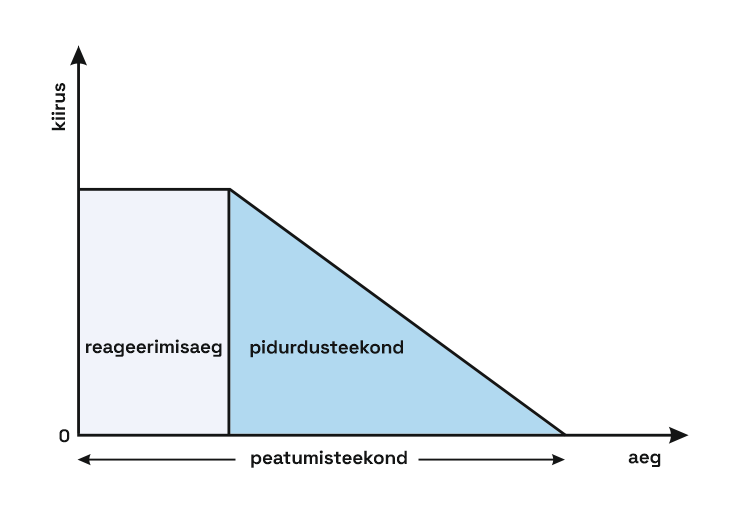
Kuna liikumisenergia on kiirusest ruutsõltuvuses, võib lihtsustatult öelda, et vähendades kiirust veerandi võrra, väheneb peatumisteekond poole võrra. Kokkuvõttes, mida kiiremini droon liigub, seda kauem kulub aega selle peatamiseks!
Lendu planeerides, võttes arvesse eelpool kirjeldatud riske ja tegureid, ei tohiks arvestada vaid sellise kõrgus- ja horisontaalmõõtmetega alaga, kus planeerid mehitamata õhusõidukit lennutada. Teatud juhtudel, olgu nendeks siis süsteemi rikked, välised mõjud vms, ei pruugi esmasest lennuks planeeritud alast ohutuse tagamiseks piisata. Ebavajalike või ohtlike olukordade vältimiseks on sellistel juhtudel abi planeerimise meetodist, kus arvestatakse juba enne lennu alustamist, et mehitamata õhusõiduk ei pruugi püsida planeeritud lennutrajektooril ning planeeritava lennu ala hulka arvestatakse ka sobiv varu selliste olukordadega toime tulemiseks.
Kuigi järgmine meetod on riskide maandamise eesmärgil eelkõige kasutusel erikategoorias teostatavate lendude korral, on see oma universaalsuse tõttu rakendatav ka avatud kategoorias teostavatel lendudel.
Seda meetodit rakendades tuleb esmalt määrata lennu geograafiline piirkond ehk maapealne ala, mille kohal toimub planeeritud lennutegevus. Lisades maapealsele alale soovitud maksimaalse lennu kõrguse, saame kolmemõõtmelise õhuruumi osa ehk lennu geograafilised piirid.
Ideaalis peakski õhusõiduk kogu lennu vältel püsima antud geograafilistes piirides.
Sõltuvalt lennu eesmärgist ja asukohast võivad lennu geograafilised piirid olla oma kujult väga erinevad.
Peale lennu geograafiliste piiride määramist lisatakse maapealsele alale varuala ning lennu geograafilistele piiridele varumaht. Selle eesmärk on tagada ohutus juhuks, kui õhusõiduk mingil põhjusel ei suuda püsida lennu geograafilistes piirides.
Varuala ja varumahu suuruse määramisel peaks arvestama nii kasutatava õhusõiduki omadusi, keskkonnatingimusi kui võimaliku maapealse riski aspekte.
Juhul kui lend vajab ametiasutuste kooskõlastust, siis kooskõlastuses tuleks esitada lennutegevuseks planeeritav ala just varumahu ulatuses.
Viimasena määratakse maapealne riskipuhver, mille eesmärk on vähendada õhusõiduki poolt tekitatavat riski, juhul kui õhusõiduk väljub mingil põhjusel, näiteks tehnilise rikke tõttu, varumahuks määratud alast.
Nii varuala kui maapealse riskipuhvri horisontaalne ulatus peab olema selline, et maksimaalselt kõrguselt kukkuv õhusõiduk ei väljuks maapealse riskipuhvrina arvestatud alast.

Joonis 4. Lennuks planeeritav ala koos riskipuhvriga
Eelpool mainitud teise õhusõiduki, eelkõige mehitatud õhusõiduki ilmumine lennu alasse tähendab üldjuhul seda, et kaugpiloodil on kohustus koheselt tagada ohutu kaugus mehitatud õhusõidukist, vähendades selleks lennukõrgust või võimalusel maanduda.

Joonis 5. Mehitamata õhusõiduk peab teed andma mehitatud õhusõidukile
Teatud perioodidel võivad lennuvahendit ohustada ka pesitsevad linnud, kelle jaoks kujutab droon vaenlast või konkurenti. Katustel ja parkides pesitsevad kajakad, varesed jt suuremad linnud või ka väiksemate lindude parved on seega üks risk, millele lendu planeerides tähelepanu peaks pöörama.
Võimalikult hea olukorrateadlikkus planeeritava lennu alast, selle ümbrusest ja omadustest ning korralik ettevalmistus on eduka lennu aluseks.